Bridge the Gap - Bring your Software to life with Elixir and Nerves
Writing code is fun, but nothing tops seeing your code moving things in the real world. That’s why I tested out the Nerves library and used $20 of Raspberry Pi utensils to let software wave a flag for me.
<iframe width="560" height="315" src="https://www.youtube.com/embed/jterXt63tYM?si=-1N1--OiuE7q_brz" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture; web-share" referrerpolicy="strict-origin-when-cross-origin" allowfullscreen></iframe>The Hardware
For this project, I used the following hardware:
- Raspberry Pi Zero W
- 28BYJ-48 5v Stepper Motor with ULN2003 Board
- 16GB microSD Card
- A flag
- Some cables
The Wiring
Here’s an overview of how to connect the ULN2003 to the Raspberry Pi.
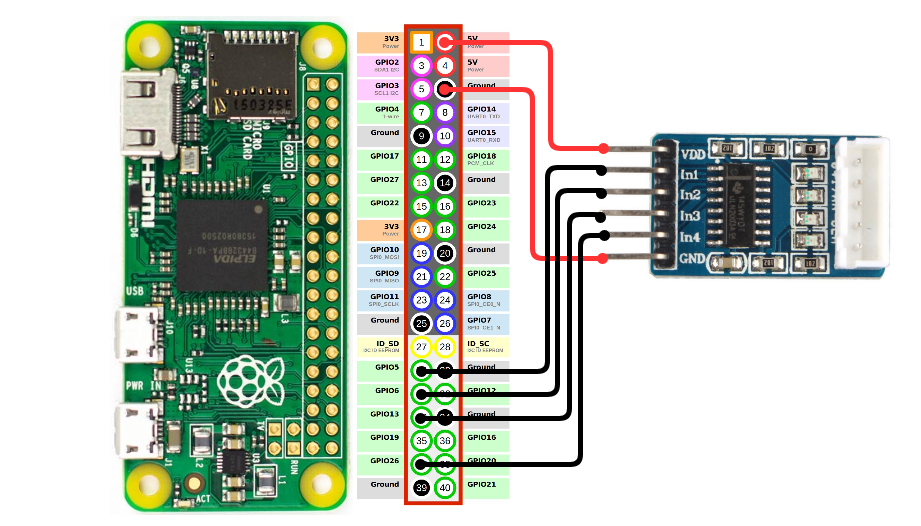
After you connect the ULN2003 Board to the Pi, connect the Stepper Motor to the ULN2003 and the Pi to your Computer. IMPORTANT: Connect the Pi to your Computer using the USB port and not the PWR port. Otherwise, you will not be able to transfer or execute code from your Computer on the Pi.
Also, make sure to connect the wires properly. The LEDs on the ULN2003 Board should glow red once you start the stepper motor.
Setting up the Project
You can find the full code on GitHub. Here’s how you set up the project from scratch.
If you haven’t already, first install the Nerves dependencies for your operating system
# On macOS, run:
brew update
brew install fwup squashfs coreutils xz
# On Linux, run:
sudo apt install build-essential automake \
autoconf git squashfs-tools ssh-askpass
Then install the Nerves Bootstrap library
mix archive.install hex nerves_bootstrap
Next, create a new Nerves project and install its dependencies
with
mix nerves.new move_it
cd move_it
Add the circuits_gpio dependency to your mix.exs file
defp deps do
[
...
{:circuits_gpio, "~> 0.4.1"},
...
]
end
Install the dependencies with
export MIX_TARGET=rpi0
mix deps.get
You should now have a fully set up project. As a last step, enable the logger by changing the rootfs_overlay/etc/iex.exs like this:
if RingLogger in Application.get_env(:logger, :backends, []) do
IO.puts("""
...
""")
RingLogger.attach() # <- Add this line
end
The Code
Open the lib/move_it/move_it.ex file and fill it with the following code:
defmodule MoveIt do
@moduledoc """
Documentation for MoveIt.
"""
require Logger
alias Circuits.GPIO
@pins [5, 6, 13, 26]
def start(count) do
pins =
Enum.reduce(@pins, [], fn pin, acc ->
Logger.info("Starting pin #{pin} as output")
{:ok, gpio} = GPIO.open(pin, :output)
acc ++ gpio
end)
Logger.info("Starting the motor. Hold on to your butts!")
spawn(fn -> step(count, pins) end)
{:ok, self()}
end
defp step(0, pins) do
Logger.info("End reached. Closing the pin connections...")
for pin <- pins do
pin
|> GPIO.write(0)
|> GPIO.close()
end
Logger.info("Pin connections closed. Good bye.")
end
defp step(round, pins) do
Logger.info("Round Nr: #{round}")
next_idx = rem(round, length(pins))
prev_idx = if next_idx == 0, do: length(pins) - 1, else: next_idx - 1
next_pin = Enum.at(pins, next_idx)
prev_pin = Enum.at(pins, prev_idx)
GPIO.write(prev_pin, 0)
GPIO.write(next_pin, 1)
Process.sleep(2)
step(round - 1, pins)
end
end
The code above first opens the GPIO pins with the GPIO.open/2 function and then starts the motor by sequentially enabling and disabling the Pins. This causes the stepper motor to move one step forward each time one of the pins is enabled. You can adjust how many steps the motor will make by defining the count parameter when starting the script with MoveIt.start(count)
Setting up the Raspberry Pi
First, insert the SD card into your computer.
Now, bundle the code into a firmware and copy it to the SD Card with the commands
mix firmware
mix firmware.burn
Nerves “should” be able to find your SD card and will ask you to confirm it. If it doesn’t find your SD card, you can supply the mount point with the -d option like so:
# For example
mix firmware.burn -d /dev/rdisk2
After the copy process is completed, insert the SD Card into your Raspberry Pi and connect the Pi with the USB cable to your computer.
Getting Things moving
Now, the thrilling part comes. Connect your computer to the Raspberry Pi with
ssh nerves.local
This will start an iex terminal on the Raspberry Pi. Now, start the motor with
MoveIt.start(1200)
The motor should turn, you should be filled with awe, and in the distance you will hear the appreciative clapping of Richard Stallman for using open-source software :)